Pix2PixHD
《High-Resolution Image Synthesis and Semantic Manipulation with Conditional GANs》: https://arxiv.org/pdf/1711.11585.pdf
Main Contribution
- 增加一个 loss:真假样本的 Discriminator 的中间特征距离(Feature matching loss),再配合 VGG 之类 Perceptual Loss。算是最可看的一点。
- 高分辨率生成。Generator 使用 Coarse-to-Fine 逐步生成高分辨率,也就是论文里的先训练低分辨率 Global,然后在外面套一层 Local Enhancer 把中间特征跳过去加起来以求得到高清高分辨率。Discriminator 则送进两种尺度的图像。经过实际验证多尺度输出+多尺度监督会更好,这些都算是落地标配了。
Architecture
pix2pix:使用 UNet generator + patch-based discriminator,输出 256x256,直接输出高分辨率的话不稳定且质量低,于是进行改良。
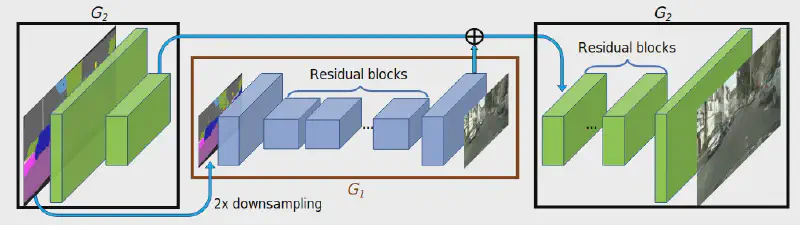
Coarse-to-fine generator
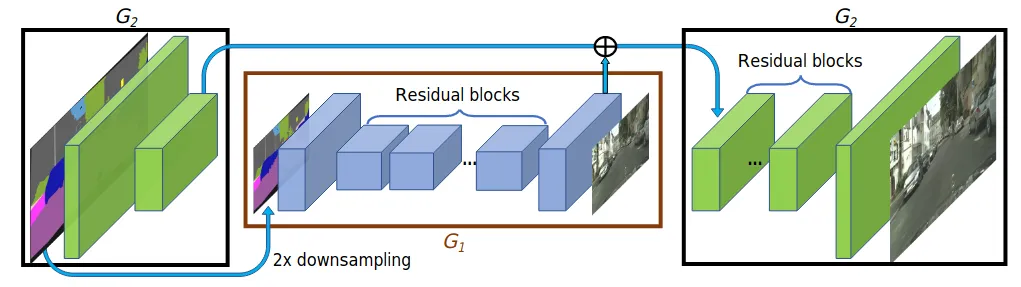
G1 为 global generator 处理 1024x512 图像,G2 为 local enhancer 处理 2048x1024 图像,同样的可以扩增出 G3 等等。
G1 采用架构为: https://arxiv.org/abs/1603.08155 ,其中提到的两个 Perceptual Loss Functions。


Multi-scale discriminators
高分辨率需要大的感受野,而更大的卷积核或者更深的网络会有潜在过拟合的可能,且内存增长也很大。于是采用图像金字塔,对输入图缩小几次,得出几种尺度的图像,再根据缩放次数建立多个相同架构的 discriminators 来分别处理各自尺度(Patched Base),最后综合起来得出结果
Feature matching loss

结合 Feature matching loss 和 GAN loss,得到最终的 loss:

Instance maps
为了解决 semantic label 无法区分物体的缺点,需要引入 instance maps,但是由于事先不确定 instance 个数,所以不好实现。基于此,作者指出 boundary 才是其中最重要的信息,先计算出 instance boundary map(四邻域里有不同的 label 则为 1,否则为 0),再 concat 一起送入 generator 和 discriminator
Image manipulation
为了使 manipulation 结果多样化且合理,加入 instance-level feature embedding,和 semantic label 一起作为 generator 输入。具体来说,需要额外训练一个 encoder-decoder,最后一层按 instance 进行平均池化,再将池化结果 broadcast 到 instance 每个像素。这样处理完整个训练集后,对各类别使用 K-means 就可以得出多种 instance feature,推理时随机选取一种 concat 输入进行 generate 就可以完成目的。encoder-decoder 的具体训练方法见论文 3.4。
Implementation Notes
- 先训练 G1 再训练 G2,最后合在一起 fine-tune,作者提到此多分辨率 pipeline 易于建立,而且一般两种尺度就足够了
- 为了配合 Instance maps,semantic label 采用的 one-hot 形式
- 训练方法使用 LSGAN,Feature matching loss 的系数为 10
Experiments
- 使用了语义分割网络对真实图像和生成图像进行分割,比较两者的 mIoU 等差异,结果 pix2pixHD 的方法得到的分割指标接近使用真实图像的指标:0.6389 : 0.6857
- Human A/B tests
- 非限制时间,500 张 Cityscapes 图像比较 10 次,产生 5000 个结果,统计在两种方法中选取其中一个的概率。结果:未使用 instance map 下 pix2pixHD 和 pix2pix 是 94% : 6%,pix2pixHD 和 CRN 是 85% : 15%,VGG Perceptual Loss 似乎没有起到明显的正负面倾向,对结果影响在 1% 内
- 限制时间,随机在 1/8s - 8s 间选取时间来展示给受试者,判断那张图片更好,据称可以看出需要多长时间才能意识到两者的差异,大概就是某种程度上能比较差异的粗略显著性

- 非限制 loss 比较,GAN + Feature matching + VGG Perceptual loss 比上单独 GAN loss、GAN + Feature matching loss 的 preference rate 分别为 68.55%,58.90%,稍微有一些提升,但不是很明显
还剩下了几个实验,但这些实际效果都存疑,其实作用都不是特别明显,实验有些偏颇,generator 和 loss 方面的提升应该是最明显的
参考:
Vid2Vid
Pix2PixHD 的视频生成改进,主要是针对 temporally incoherent,我没有看论文,只看了一下代码和博客,Generator 大致的修改就是:
- Pix2PixHD Global 的本体不变,输入改成前后多帧 concat 起来的图像,并且增加一支将过去几帧生成图像提取出特征加到主支上的分支,大概就是为了利用过去生成的图像来生成现在的图像。这样的话头几帧理论上就需要单独另外提供。
- 分出一支用来生成光流图和表示模糊程度?的掩码,用光流图 warp 最近一帧生成图像,根据掩码在 warp 的前一帧生成图和当前生成图中做加权,得出最终结果。
- 如果有前背景的掩码的话,再加一支类似 2 的分支,生成前景图和前景图掩码然后加权。
也就是说如果不使用前背景的话,实际需要两个 Pix2PixHD 的网络,输入增加前几帧,以及中间提取前几次生成图的特征后的耦合,还有一个光流 warp 的后处理。下面的图非常直观: https://img-blog.csdnimg.cn/2019030516345690.gif
参考: