如何处理含nan值的光流图像
做光流图像时容易出现很多噪点,将重采样后变化较大的部分 mask 掉,就可以得到相对可靠但是有缺失值(nan)的图像:
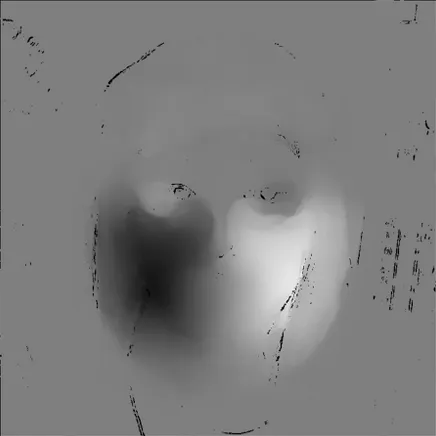
突发奇想的一种解决方法就是采集每个以缺失点为中心的 32x32、16x16、8x8、4x4、2x2 的区域(还可以更高)的非 nan 均值,这些均值可以看作一个点的运动(由大范围模糊准确值向小范围精确噪声值运动),再直接取均值就能得到考虑了图像连续性的一个较好的估计。得出结果如下:

这种方法好处在于比较好实现,可以考虑带掩码的全局滤波器组的实现方法,效果应该也不错。而且还能扩展,比如用其他先验方法来取区域和值来代表,以及点的运动也可以引入先验知识来估计。不知道一般是怎么处理的,反正直接平滑就够用。
朴素实现
import cv2
import copy
import numpy as np
def crop_rect(img, rect, border_mode=cv2.BORDER_CONSTANT, value=0):
"""Crop a rectangle area from image, this allow the area partly outside the image.
Args:
img(array): opencv image
rect(tuple/array): tuple of (left, top, right, bottom)
Outs:
face_img(array)
pad_l, pad_t(tuple): bias of axis origin
"""
if isinstance(rect, np.ndarray):
rect_int = np.int64(rect.flatten())
else:
rect_int = list(map(int, rect))
face_lt = rect_int[:2]
face_rb = rect_int[2:4]
pad_l = -face_lt[0] if face_lt[0] < 0 else 0
pad_t = -face_lt[1] if face_lt[1] < 0 else 0
pad_r = face_rb[0] - img.shape[1] if face_rb[0] > img.shape[1] else 0
pad_b = face_rb[1] - img.shape[0] if face_rb[1] > img.shape[0] else 0
pad_img = cv2.copyMakeBorder(
img, pad_t, pad_b, pad_l, pad_r, border_mode, value=value
)
face_img = pad_img[
face_lt[1] + pad_t : face_rb[1] + pad_t + pad_b,
face_lt[0] + pad_l : face_rb[0] + pad_l + pad_r,
:,
]
return face_img, (pad_l, pad_t)
def gradual_mean(raw_array, nan_mask=None, max_window_size=32):
"""
raw_array: (H, W, C) array
nan_mask: (H, W) array
"""
assert len(raw_array.shape) == 3
src_array = copy.deepcopy(raw_array)
if nan_mask is None:
nan_mask = np.sum(src_array, axis=-1)
nan_ys, nan_xs = np.where(np.isnan(nan_mask))
for cx, cy in zip(nan_xs, nan_ys):
window_size = max_window_size
window_mean = []
while window_size > 1:
half_l = window_size // 2
window_rect = (cx - half_l, cy - half_l, cx + window_size, cy + window_size)
window_img = crop_rect(src_array, window_rect)[0]
window_mean.append(np.nanmean(window_img, axis=(0, 1)))
if np.isnan(np.sum(window_mean[-1], axis=-1)):
break
window_size = window_size // 2
window_mean = np.array(window_mean)
src_array[cy, cx] = window_mean.mean(axis=0)
return src_array向量化实现
用 pytorch 向量化一下可以到 3ms 这样
import copy
import warnings
import numpy as np
import torch
from torch.nn import functional as F
def gradual_mean_pytorch(raw_tensor, max_window_size=33):
"""
Compute the gradual mean of a tensor using PyTorch functions.
Args:
raw_tensor: a PyTorch tensor of shape (batch_size, channels, height, width)
containing the input data
max_window_size: an integer specifying the maximum size of the filter window
Returns:
raw_tensor_fil: a PyTorch tensor of the same shape as raw_tensor
containing the filtered data
"""
# 1. Calculate filters window size
max_iters = int(np.log2(max_window_size - 1))
window_sizes = np.logspace(1, max_iters, max_iters, base=2, dtype=np.int64) + 1
if window_sizes[-1] != max_window_size:
warnings.warn(
f"max_window_size {max_window_size} is not aligned with max filter size {window_sizes[-1]}",
UserWarning,
)
# 2. Get non-nan tensor and mask
nan_mask = torch.isnan(raw_tensor)
valid_mask = torch.logical_not(nan_mask)
valid_tensor = torch.nan_to_num(raw_tensor, nan=0.0)
# 3. Smoothen non-nan tensor and mar
filtered_tensor = torch.cat(
[
F.avg_pool2d(valid_tensor, ws, stride=1, padding=ws // 2)
/ F.avg_pool2d(valid_mask.float(), ws, stride=1, padding=ws // 2)
for ws in window_sizes
],
dim=0,
)
# 4. In case there were still nan
valid_filtered_mask = torch.logical_not(torch.isnan(filtered_tensor))
valid_filtered_tensor = torch.nan_to_num(filtered_tensor, nan=0.0)
# 5. Mean merge all filtered tensor
mean_filtered_tensor = torch.sum(
valid_filtered_tensor, dim=0, keepdims=True
) / torch.sum(valid_filtered_mask, dim=0, keepdims=True)
# 6. Replace NaN values in the input tensor
raw_tensor_filtered = copy.deepcopy(raw_tensor)
raw_tensor_filtered[nan_mask] = mean_filtered_tensor[nan_mask]
if torch.sum(torch.isnan(raw_tensor_filtered)) > 0:
print("nan still exist after filtering.")
return raw_tensor_filtered